Vertical Pump and Motor
11.9.1 垂直 펌프의 動力學 (Dynamics of a Vertical Pump)
11.9.1.1 槪要 (Abstract)
이 내용은 발전소에서 사용되는 전형적인 물 펌프에 대한 분석 결과보고서이다. 로터 시스템을 모델링 하기가 어려워 이 수직펌프의 기계적 특성을 전혀 모르고 있지만, 최근에 개발한 침수 상태에서 이용 가능한 진동 변위 변환기를 사용하면 운전상태하에서도 펌프의 동특성을 측정할 수 있다.
본 내용의 목적은 수직 펌프의 성능과 신뢰도에 미치는 불평형, Misalignment 및 수력학의 영향을 알아 낼 뿐만 아니라 진동 감시 변환기의 선택방법 및 설치 방법을 아는데 있다.
11.9.1.2 機械 諸元 (Machine Specifications)
수직 펌프와 전동기의 개략도는 그림 11-83과 같다. 이 펌프의 축은 원인 모르게 수년동안 여러 번 손상된 바 있었다.
하부 베어링은 펌프 End Bell에 의해 지지되며 그리스 윤활 방식을 채용한 청동 부싱으로 되어있다. 펌프의 수직 칼럼에 의해 지지되는 중간 베어링은 수 윤활 방식이며 부채꼴 모양의 고무로 되어 있다. 이러한 형태의 베어링을 Cutlass Bearing 또 Bumper라고 부르기도 한다. 축간의 커플링은 강성체결하고 180˚ 간격으로 떨어진 2개의 Key를 통하여 동력을 전달한다.
그림 11-83 수직 펌프의 구조도[그림에서 A, B, C 등은 측정점의 수직위치를, S(남쪽) 및 W(서쪽)는 수평위치를, D는 변위 검출기, V는 속도 변환기를 나타냄]
이 펌프의 회전수는 720 rpm, 동력은 1,250 BHP, 정격 용량은 6,800 t/h 그리고 정격차압은 43 m이다.
이 펌프는 공동 Header에 연결된 동일한 3대의 펌프중 하나로 유량제어는 각 펌프의 출구측 배관에 있는 제어 밸브에 의해 이루어진다.
11.9.1.3 變換器 選定 (Transducer Selection)
이 형태의 펌프의 로터 동특성에 관한 정보가 거의 없기 때문에 변위 및 속도 변환기를 각 베어링과 전동기 커플링에 그림 11-83과 같이 설치하였다.
위치 C, D에서의 변환기들은 강물 수위 아래에 있어 방수설계의 변환기 사용이 요구되고 있다. 또한 이들 변환기는 기계적인 보호가 되고, 유체 속의 모래의 마멸 작용에 견디도록 설계되어야 한다. 그림 11-84는 사용하였던 Probe 설계의 개략도 이다.
그림 11-84 방수 변위변환기 개략도
11.9.1.4 靜的 試驗 (Static Testing
로터 시스템의 길이 방향과 비틀림 공진상태를 알아보기 위해 시험적으로 시험해 보았다. 이 시험은 펌프축, 전동기축 및 임펠러에 수직 방향으로 계측기를 달고 또 계측기가 장치된 가진 해머로 로터 전체를 가진하여 수행되었다. 그림 11-85에 종합한 시험 결과는 다음 항의 현장시험에서 취한 자료와 상관 관계가 있었다. 펌프 속도가 720 rpm일 때 이 시스템은 2차와 3차 사이의 횡방향 공진 상태에서 운전하게 된다.
EPRI 컴퓨터 코드를 사용하여 로터의 횡방향 모드를 모델화 하려 하였으나 베어링 특성을 알기가 어려워 중단되었다.
로터의 1차 비틀림 공진은 690~765 cpm에서 발생한다. 이 범위는 운전속도를 포함하고 있기 때문에 비틀림 분석은 보증되었다. 전단 응력을 측정하기 위해 원격측정이 가능한 Strain Gauge를 사용하였다. 그 값은 피로한도 훨씬 아래로 아주 낮았고 이는 시스템이 비틀림에 대해서는 충분히 감쇠 되고 있음을 나타낸다.
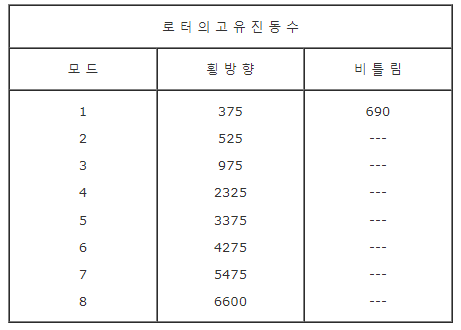
그림 11-85 로터의 고유 진동수(cpm)
11.9.1.5 現場 試驗 (Field Testing)
Scuba Diver가 펌프 Intake로 수영하여 Weight를 달거나 뗄 수 있도록 하여 펌프를 들어올리지 않고서도 임펠러 Blade에 Balancing Weight를 달수 있도록 펌프 임펠러를 개조하였다. 개조후 공장 Balancing하고 앞서 언급한 변환기들을 조립한후 케이싱에 설치하였다. 펌프와 전동기의 Alignment에 많은 주의를 기울였다. 펌프의 축방향 위치는 임펠러의 Leading Edge와 Casing간의 간극이 제작자의 제원에 맞도록 조정되었다.
11.9.1.6 不平衡 (Imbalance)
다른 가변 상수는 그대로 두고도 임펠러의 발란스 상태는 변화되었다. 불평형량은 5.7 kg-㎝이고, 이로 인한 원심력은 38 kg으로 로터 중량인 453 kg의 약 8.4% 이다. 그림 11-86과 11-87은 하부 및 상부 베어링에서 Balance Weight를 달았을 때와 달지 않았을 때의 Orbit과 Timebase Plot 이다. 하부 베어링(D)에서의 그림은 불평형의 영향을 분명히 보여 주고 있는데 상부 베어링(B)에서의 그림은 큰 변화를 보여주지 않고 있음에 유의할 것.
그림 11-86 Balancing Weight 달기 전후의 하부베어링의 Orbit과 Timebase Plot
그림 11-87 Balancing Weight 달기 전후의 상부 베어링의 Orbit과 Timebase Plot
11.9.1.7 誤整列 應答 試驗 (Misalignment Response Testing)
전동기의 한쪽 아래에 0.25 ㎜의 Shim Plate를 넣어 전동기축과 펌프축간의 Alignment를 변화시켰다. Face Alignment 상태는 약 2˚ 경사지었고 Rim Alignment는 이런 형태의 커플링에서는 변할 수가 없다. 그림 11-83 위치 B에서의 Orbit과 Timebase 진동치는 그림 11-88에 나타내었다. 두 번째 기동시의 Orbit 모양이 약간 타원이 된 것은 Misalignment에 의한 Preload 때문이다. 동일한 자료의 Spectrum(그림 11-89)에서는 Misalignment가 심하지 않은 것으로 나타나 있다. Misalignment 진동은 1×이고 전형적인 강력한 2× 진동은 보이지 않았다. 예상한데로 Preload는 하부 베어링에서는 거의 없었다.
그림 11-88 Misalignment 상태에서 상부 베어링에서의 Orbit과 Timebase Plot
그림 11-89 Misalignment 상태에서 상부 베어링에서의 Spectrum
11.9.1.8 水力學的 應答試驗 (Hydraulic Response Testing)
임펠러의 Leading Edge와 케이싱간의 간극을 설계치인 1.1 ㎜와 5.1 ㎜, 두 경우에 대하여 시험하였다. 간극이 큰 경우는 출구 압력이 1.4 kg/㎠g 감소되었는데 이는 재순환량이 많고 효율이 감소되는 것을 잘 나타내고 있다.
설계간극으로 시험한 경우 하부베어링에서의 변위 검출기에서 취한 스펙트럼(그림 11-90)상에 372 cpm의 강력한 차동기 진동 응답이 있음을 알 수 있다. 이 주파수는 펌프축의 횡방향의 1차 고유 진동수이다. 간극이 증가되었을 때 차동기 진동은 보다 덜 안정이 되었고 넓은 주파수 범위에 걸쳐서 발생하였다. 앞에서 발란스 응답 시험에서 관찰한 바와 같이 전동기 근방에 위치한 변환기는 임펠러에서 차동기 진동은 측정할 수 없었다.
그림 11-90 차동기 진동성분을 보여주는 하부베어링에서의 진동 스펙트럼
수력학적인 응답시험으로 차동기 진동에 의한 1차 공진의 가진이 축 손상의 원인임을 알았다. 축 손상은 금속학적 분석결과 굽힘 피로 손상으로 진단되었다. 그러나 몇 가지 풀지 못한 의문점이 남아 있었다.
① 왜 진동은 설계 간극인 경우에 더 높은가?
② 왜 최근에는 축 손상 없이 운전되었나?
③ 현재 강수위에서는 정격압력이 6 kg/㎢g인데 왜 출구압력이 겨우 4.4 kg/㎢g인가?
정비 기록을 재검토한 결과 축 손상의 시작은 임펠러 공급자의 변경으로 인한 것이 드러났다. 근래의 축은 원 제작자로부터 구입하지 않았다. 원 제작자는 Blade Attack Angle의 미묘한 변화가 횡방향의 1차 고유진동수를 재 가진 시킬 수 있다고 지적하였다.
11.9.1.9 結論 (Conclusions)
이 시험으로부터의 주요 2가지 결론은 다음과 같다.
① 장축의 수직펌프의 완벽한 진동감시는 임펠러 근처의 축의 운동을 측정하지 않고서는 이루어질 수 없다. 이 펌프는 위치 A에 설치한 변환기를 사용하여 여러 경우에 대하여 분석되었다. 케이싱 변환기들(속도 및 가속도)은 720 rpm으로 운전하는 펌프 축의 1차 공진 주파수에서 발생하는 큰 차동기 진동을 검출하지 못했다.
② 수력학적 영향이 불평형이나 얼라인먼트 영향보다 몇 배 더 크게 나타난다. 진단을 할 때는 어떠한 경우에도 수력학적인 자료의 상관 관계를 포함시켜야 한다.
11.9.2 垂直 펌프 電動機에서 不平衡에 의한 共振 增幅 (Amplification of Unbalance in Vertical Pump Motor System)
수직 펌프에서 시스템의 고유진동수가 운전속도 가까이에 있으면 전동기 상부에 과도한 1× 진동이 발생하는 것을 흔히 경험하게 된다. 일반적으로 공진주파수를 낮추게 되면 진동 증폭 현상이 충분히 방지될 수 있다.
일반적으로 허용 범위내에 있는 수직 전동기의 Rotor 불평형이라도 구조적인 고유 진동수가 운전 주파수에 가까이 있으면 공진 증폭 현상이 발생되는 것을 수직 펌프 기계에서 흔히 경험하게 된다. 이것은 흔히 펌프 임계속도 현상(Critical Speed Phenomenon)이라고 잘못 인식되기도 하는데, “임계속도”라는 용어는 회전 요소의 공진에만 적용된다. 여기서 논의하고자 하는 것은 일반적으로 훨씬 더 많이 겪게 되는 전체적으로 조립되어 있는 시스템에서의 구조적 공진 현상에 대해서이다.
만일 회전속도가 N1이라면 일반적인 잔류 불평형으로 인한 진동은 V1이 될 것이다. 이것에 대해서, 회전 속도가 기계적 공진을 통과할 때의 진동 진폭 대 회전 주파수의 곡선을 나타내는 그림 11-91에서 설명되고 있다. 만일 회전속도가 N2의 공진점으로 증가되면 진동은 3배로 증가할 것이다. 그러나 만일 회전 속도가 N3의 공진점과 일치하게 되면, 진동은 V3와 같이 정상치의 수배까지 증폭될 것이다.
만일 속도가 N3에서 일정하게 유지되고 공진곡선이 우측 또는 좌측의 어느 한쪽으로 이동되면, 진동은 정상수준으로 낮아질 것이다. 그러므로 기계적으로 공진하는 정속 기계의 진동을 낮추는 가장 확실한 방법은 공진 주파수를 변화시키는 것이다. 이러한 목적을 달성하기 위한 방법을 논의하기 전에 전체적인 구조도를 고려해 본다.
그림 11-91 시스템의 공진과 응답
11.9.2.1 構造的 側面의 考慮 (Structural Considerations)
이러한 과도한 진동은 서로 크게 다른 설계 구조의 차이 때문에 수평형 펌프보다 수직형 펌프에서 더 자주 나타난다. 예를 들어, 용량이 1000 마력인 수평 펌프와 전동기는 보통 육중한 콘크리트 기초 위에 면적이 넓은 Baseplate에 설치된다. 전동기와 펌프의 무게 중심은 기초로부터 약 1~1.2 m 이내에 있을 것이고, 전동기의 횡방향 고유 진동수는 운전 속도보다 훨씬 더 높을 것이다.
탄성 계수(Spring Rate)를 감소시키거나 무게 중심의 높이를 증가시키면 고유 진동수가 감소된다는 것을 염두에 두고, 수직형으로 설계되어 있는 동일 마력의 펌프를 고려해 보자. 펌프는 지지용 기초대 아래에 있으며, 지면 위에 보이는 것은 수직으로 설치된 전동기를 지지하는 Discharge Head 부분뿐이다. 전동기의 무게 중심을 크게 증가시키면 당연히 횡방향 고유 진동수가 감소한다는 것은 분명한 사실이다. 또한 펌프 Head 부분에는 전동기와 펌프사이의 커플링에의 접근이 가능하도록 창이 설치되어 있으며, Discharge Head가 얹혀 있는 지지용 기초대는 취수조 위에 매달려 있는 Discharge Column이 통과하도록 중심부에 구멍이 나 있다. 이와 같이 전동기가 지지되는 시스템의 횡방향 고유 진동수는 수평으로 설치된 펌프의 고유진동수보다 훨씬 더 낮을 것이다. 만일 고유 진동수가 운전 속도 가까이에 있다면 허용범위내에 있는 전동기 불평형력이 공진 증폭을 일으켜 과도한 진동이 발생할 것이다. 전동기의 온도가 상승하면서 Rotor Bar의 이동으로 생기는 소량의 불평형으로도 공진 증폭에 의해 과도한 진동을 일으키게 된다. 이것이 전동기 회전자의 문제라고 결론을 내리는 것은 틀린 생각이며, 시스템을 재조정하면 진동이 제거될 것이다.
11.9.2.2 Reed 周波數의 測定 (Testing for Reed Frequency)
“Reed Frequency”라는 용어는 펌프 제조업계에서 사용하는 말로서 수직형 펌프 전동기에서 나타나는 고유 진동수를 가리키며 이는 다음과 같은 방법으로 측정할 수 있다.
여자되지 않은 전동기 꼭대기에 속도 변환기를 설치한 다음, 묵직한 나무 망치로 Pickup이 설치된 반대방향(Pickup의 손상을 방지하기 위해)에서 전동기에 충격을 준다. 충격을 주는 위치는 전동기가 운전되고 있을 때와 같은 진동 Mode로 가진 시키기 위하여 전동기의 질량 중심 가까이어야 한다.
이때 생기는 진동은 비교적 짧은 시간동안 지속되지만 분석기의 주파수 측정기에 충분히 기록될 수 있다. 만일 기록계가 최고치에 잠깐이라도 머물러 있으면 이 기록치는 유효한 것이 된다. 그러나 만일 측정기의 기록이 단순하게 올라갔다가 즉시 내려온다면 정확한 값을 얻었는지 확신할 수 없다.
만일 주파수 측정기를 사용할 수 없거나 신호 유지 시간이 너무 짧으면, Oscilloscope나 펜을 사용하는 Oscillograph를 사용하여 이 신호를 기록할 수 있다. 주파수는 Sweep Rate나 사이클 수에 의해 결정될 수 있다 (그림 11-92).
그림 11-92 Motor Impact Oscillogram
만일 충분히 빠른 Sample Time 기능이 있는 FFT 분석기를 사용할 수 있다면, 충격 신호가 감소하는 것을 실시간으로 볼 수 있다. 충격으로 인해 생긴 가짜 신호들은 공진 주파수를 나타내는 신호보다 더 빨리 감소할 것이다. 어떤 계측기들은 감소 과정을 천천히 보여주다가 공진 주파수가 아주 명확하게 나타날 때 화면을 정지시킬 수 있다. 그렇게 되면 분석기 화면으로부터 주파수를 읽을 수 있다. 어떤 방법이 사용되든지 간에 측정 자료는 Discharge Nozzle의 방향과 90˚ 방향에서 수집되어야 하는데, 이것은 펌프 Head의 탄성계수가 두 방향에서 서로 다르기 때문이다.
또 다른 방법은 불평형 Weight를 가진기로 사용하는 아주 작은 마력의 가변속 전동기를 사용하는 것이다. 전동기 위에 설치된 광학, 또는 자석식 Pickup은 속도신호를 제공할 수 있다. 이 장치는 진동 가진기의 축(Axis)과는 수직으로 펌프 전동기 측면에 부착된다. 회전 불평형은 펌프 전동기를 수평 궤도(Orbit)로 움직이게 하며, 이것은 가진기를 재설치할 필요없이 Discharge Pipe와 수평, 수직방향에서 공진 주파수를 가진 시킨다. 진동 진폭 대 가진기의 속도 좌표는 전동기-Head-기초대의 공진 주파수를 분명하게 나타낼 것이다.
만일 운전 주파수와 공진 주파수 사이에 어느 정도의 차이가 있다면, 어떠한 공진 주파수를 가지고 있다 하더라도 전동기 회전자의 불평형을 감소시키면 충분히 만족할 만한 수준의 진동을 얻게 될 것이다. 그러나 만일 공진 주파수가 운전 주파수와 정확하게 일치한다면 불평형 위상각이 불안정으로 Balancing이 불가능하다.
11.9.2.3 스프링 作用 및 振動 모드 (Spring Action and Vibratory Mode)
구조물 전체는 그림 11-93에서 보여주는 것과 같이 꼭대기에 질량을 가지고 있는 Stem과 함께 진동한다. 이것은 간단한 스프링-질량계이므로 그림 11-94에서와 같이 두 개의 스프링을 직렬로 연결하여 만든 스프링에 매달린 Weight라고 생각해 보자. S1은 좀더 유연한 스프링이고 S2는 강성 스프링이다. Weight는 전체 스프링의 변형과 부착된 Weight 질량의 함수인 주파수로 상하 반복운동을 할 것이다. 최대 움직임은 좀더 유연한 스프링인 S1에서 일어나며, 스프링 S2는 매우 적게 늘어날 것이다.
그림 11-93 Reed Mode의 진동
그림 11-94 스프링-질량 계 11-95 낮은 주파수 스프링-질량 계
만일 다른 스프링 S3를 그림 11-95와 같이 직렬로 연결한다면 전체 시스템 의 고유 진동수는 감소할 것이다. 결과는 같기 때문에 스프링의 연결 순서는 중요치 않다. 비록 이 그림은 수직으로 작용하는 스프링-질량계이지만 “한 개의 갈대”처럼 움직이는 스프링-질량계에서도 똑같다.
실제 시스템에서의 스프링은 볼트로 연결되는 전동기와 펌프 Head 설치용 Flange, 펌프 Head, 펌프 Head 기초대 Flange와 기초대 등이며 이것들은 결코 무한 강성이 아니다. 모든 스프링은 직렬로 작용하여 대부분 기초물로부터의 질량 중심 높이와 전동기 질량의 함수인 주파수를 만들어낸다.
만일 기초대에서의 수직방향 측정치가 펌프 Head 기초대 Flange에서의 수직방향 측정치와 거의 같은 크기라면, 기초대가 움직이고 있는 것이며 상당히 큰 스프링 역할을 하고 있는 것이 분명하다. 만일 기초대의 수직 방향 움직임은 없는데 펌프 Head 기초대 Flange가 수직방향으로 크게 움직이고 있으면, 펌프 Head 기초대 Flange가 너무 유연하거나 기초대에 견고하게 체결되지 않았음이 명백하다.
수평방향의 진동 크기 대 펌프 Head와 전동기 측면을 따라 올라가면서 측정한 위치를 그려보면 그림 11-96과 같은 구조물의 운동에 대한 그림을 얻을 수 있다. 곡선의 경사도에 어떤 급격한 변화가 있으면 바로 이 위치에 변형(Flexure)을 나타낸다. 그림에서는 기초대와 펌프 Head의 창에 약간의 변형이 있으며, 최대 변형은 전동기 Mounting Flange에 있다.
그림 11-96 각 위치별 진동치에 의한 Mode Shape
11.9.2.4 Reed Frequency 變更 方法 (Methods of Changing Reed Frequency)
만일 Mode Shape 선도가 펌프 헤드의 개구부에서 최대의 기울기 변화를 나타낸다면 펌프 헤드의 강성을 증가시키면 시스템이 효과적으로 하향 조정될 것이다. 용접작업 과정에서 오는 구조상의 비틀림 가능성이 있기 때문에 강성을 증가시키기 위해 보강재를 용접해 붙이는 것은 바람직하지 않을 것이다. 그러나 고유 진동수를 증가시키는 간단한 방법은 개구부에 금속 커버를 설치하는 것이다. 설치할 개구부 커버는 헤드부분의 벽두께와 거의 같도록 하고 원재질과 확실히 접촉이 되도록 동일한 만곡도를 갖도록 조절해야 한다. 개구부 외주에는 다수의 캡스크류를 설치하여 개구부 커버가 헤드 구조물과 한몸처럼 움직이도록 해야 한다. 개구부 면적의 10%보다 크지 않은 커버 중앙에 있는 Inspection Hole은 커버의 설치 효과를 떨어뜨리지 않으면서도 Stuffing Box의 육안 검사를 가능하게 한다.
만일 Mode Shape 선도가 전동기와 펌프사이의 플랜지, 펌프 헤드 기초 플랜지 또는 기초 구조물의 탄성이 큰 것으로 나타나면 공진 주파수를 낮추는 것을 고려하는 것이 더욱 실용적이다.
구조물의 전체 강성을 감소시키는 것은 이의 Reed Frequency를 낮추게 하는 것이다. 이는 펌프 헤드와 기초 사이의 연결부 또는 펌프 헤드와 전동기 플랜지 사이의 연결부에 Compliance를 더함으로 해서 가능해진다. Mode Shape 선도로부터 결정된 스프링의 위치에 관계없이 어느 위치이든 효과적이다.
첫 번째 위치에 대해서, 탄성중합체(Elastomer) 물질은 기계 작동시의 충격이 주위 바닥으로 전달되는 것을 방지하기 위해서 펀치 프레스 바닥에 흔히 사용되며 또 펀치 프레스가 기초 위에서 움직이는 것을 방지하기 위해서도 흔히 사용된다. 적절한 부하표가 펀치 프레스와 함께 제공되는데 이는 펀치 프레스의 진동 절연을 위해 고안된 것이다. 만일 탄성중합체 물질이 주파수 저감 목적으로 사용된다면 부하표의 값보다 더 부하를 걸어도 된다. 그러나 표에 나와있는 권고사항을 가이드로서 사용할때 설비 무게가 과도하게 탄성중합체를 압축하는 것을 방지하기 위해 펌프 헤드 기초 플랜지와 기초 구조물 사이의 충분한 면적을 가져야 한다. 이 물질은 Oil-Proof이고 수명이 길어 이러한 문제에 대해 영구적인 해답을 제공한다. 실제로, 이러한 접근은 대형의 수평 보일러 급수 펌프에 있어서 시스템의 공진 증폭으로 인한 진동 문제의 완벽한 성공적 해결을 위한 방법으로 사용되어왔다.
만일 Flexible한 Discharge Pipe 커플링을 사용한다면, 펌프 헤드쪽으로 미치는 수평의 추력 수압을 방지하기 위하여 커플링을 가로질러 Tie Rod를 설치하는 것이 필수적이다. 기초 플랜지 고정 너트 아래에 있는 탄성 와셔와 스터드 및 캡 스크류 주위의 슬리브가 펌프 헤드를 기초 구조물로부터 완전히 격리하고, 기계적 단락을 방지하기 위해 필요하다.
펌프 헤드가 전과 같이 견고하게 설치되지 못했음으로 인해 진동이 상승할 것이라는 우려가 있을 수 있다. 그러나 전체 시스템의 고유 진동수를 바꾸기 위해 탄성중합체 패드를 사용하는 것이기 때문에 진동은 상승하지 않는다. 일단 시스템의 고유 진동수가 운전 주파수로부터 분리되기만 하면 잔류되어 있는 전동기 불평형은 더 이상 증폭되지 않는다. 따라서 진동도 만족스러운 수준까지 감소될 것이다.
몇몇 수직 펌프는 Barrel 위에 설치되기 때문에 펌프 헤드 기초 플랜지와 지지링 사이에 압력 또는 진공 밀봉장치가 필요하다. 여기에 탄성중합체를 사용하는 것은 실용적이지 않다.
주파수 저감 조정을 위한 또 다른 방법은 전동기와 펌프 헤드 사이에 주파수 저감 조정 장치를 설치하는 것이다. 이러한 개념은 1950년대 초기에 Worthington 펌프사의 Meru Berman이 처음 설계했고 특허를 냈다. 간소화된 현대식 방법은 두 개의 강철링으로 구성되는데 그 중의 한 개는 펌프 헤드 볼트에, 다른 하나는 전동기 플랜지에 설치하는 것이다. 두 개의 링은 기계적 구조를 더욱 정밀하게 정렬시키는 더욱 유연성 있는 결합을 위해 그들의 내경쪽에서 체결이 된다 (그림 11-97). Compliant에 의해 전체 시스템의 공진 주파수가 낮아짐을 의미한다. 주파수 저감 조정 방법이 전동기의 진폭을 줄여서 실제로 지지판의 Plate가 휘지 않기 때문에 피로 문제는 없다. 이러한 종류의 주파수 조정 장치는 진동으로 인한 문제를 해결하기 위해서 여러해 동안 사용되어오고 있다.
그림 11-97 주파수 De-tuning Device
전체 시스템의 고유 진동수를 낮추는 세 번째 방법은 전동기 상부에 대형 추를 설치하는 것이다. 이렇게 함으로 인해 구동체의 질량을 증가시킬 뿐만 아니라 무게 중심의 높이를 상승시킨다. 이 두 가지 영향은 Reed Frequency를 낮추게될 것이다.
수직 펌프에 있어서 진동의 공진 증폭은 흔히 나타난다. 시스템의 고유 진동수는 기초 구조물 및 펌프 헤드와 전동기 설계에 따라 영향을 받는다. 만일 펌프 헤드가 시스템의 다른 부분보다 탄성이 강하다면 헤드를 더욱 강하게 만들어서 고유 진동수를 조정한다는 것은 곤란할 것이다. 기초 구조물 또는 전동기를 더욱 강하게 만드는 것은 펌프 제조업자의 영역을 벗어나기 때문에 음향 공학적 접근 방법이 시스템을 더욱 부드럽게 만들어 그로 인하여 그 기계의 고유 진동수를 낮춘다.