Standards on Vibration Evaluation Criteria of Specific Rotating Machinery
12.6.1 일반 회전기계 (General Rotating Machiner)
12.6.2 대형 지상 증기터빈-발전기 세트 (Large Land-Based Steam Turbine Generator Sets)
12.6.3 가스터빈 세트 (Gas Turbine Sets)
12.6.4 수력 및 양수발전소의 기계 (Machine Sets in Hydraulic Power Generatoring and Pumping Plants)
12.6.5 원심, 사류 및 축류 펌프 (Centrifugal, Mixed Flow and Axial Flow Pumps)
12.6.6 왕복동 펌프 (Reciprocating Pumps)
12.6.7 송풍기 (Turbo-Fans and Blowers)
12.6.1 일반 회전기계 (General Rotating Machinery)
(1) T.C. Rathbone Chart(1939年) [베어링 진동규격]
허용 진동치에 관한 최초작품중의 하나가 1939년판 발전소 Engineering이라는 출판물에 게재된 T. C. Rathbone의 “Vibration Tolerance”이다.
Rathbone은 그 당시 New York에서 터빈 및 기계를 제작하는 회사의 선임기술자였는데 그림 12-18과 같은 Chart를 만들었다.
이 차트는 6,000 cpm이하의 저주파 진동을 평가하는데 아직도 사용되고 있다.
이 차트의 제한치는 축진동과 베어링 하우징 진동이 2:1 또는 3:1 비율을 가진 무겁고 저속인 기계의 베어링이나 구조물로부터 측정한 진동에 대해 적용되며 축진동을 이 차트에 적용해서는 안된다. 더욱이 ㎛로 나타낸 진동진폭과 cpm으로 표시된 진동주파수를 알아야 이 차트를 이용할 수 있으므로 오직 Filter를 통하여 측정된 진동값만을 이 차트에 적용해야 한다.
그림 12-18 Rathbone의 진동 허용곡선
Rathbone Chart를 살펴보면 600 cpm 이상에서 허용 진동폭이 감소함을 알 수 있다. 실제로 600 cpm이상에서 허용운전구역(Severity Region)을 나누는 사선은 거의 직선이며 속도치와 거의 같다. 이것은 흥미있는 사실인데 왜냐하면 허용 진동치를 알기 위해 지금은 전체 진동 속도값(Overall Velocity Measurement)을 이용하고 있는 것과 일맥 상통하기 때문이다. 이 차트를 발표할 때엔 물론 진동 진폭만을 측정할 수 있는 장비만 사용됐었다.
이 챠트는 경험을 정리한 지침으로서 제안한 것으로, 많은 회전기계를 대상으로 현장의 기계 기술자나 기능자의 손끝감각에 의한 판단을 기초로 작성한 것이다. 사람의 감각을 기본으로 하고 있으므로 현장기술자의 감각과 잘 일치하고 현재에도 사용되고 있다. 이 곡선은 그 후 제정된 많은 규격의 기초가 되었다. 즉 독일 기술자협회(VDI)가 1964년 제정 완료한 VDI 2056 규격의 그룹 G(높은 고유진동수를 갖는 견고한 기초상의 대형기계)는 이 진동 허용곡선을 그대로 Copy한 것으로 알려져 있다.
이 규격은 주로 대형기계에 있어서 운전시의 진동에 대한 평가를 「매우 좋다(조용하다)」에서 「매우 나쁘다」까지 6종류의 레벨로 나누어 나타내고 있다. 진동의 평가척도는 변위진폭(㎛, peak-peak)이다. 허용 곡선은 10 ㎐(600 rpm)이상에서는 진동수(회전수) n(rpm)에 거의 반비례(1/n)하고 있고, 이것이 이후에 제정된 규격들에서 진동속도를 평가척도로서 채용하는 근거가 되었다. 또한 그는 베어링의 수평방향 강성이 수직방향의 강성에 비해 낮으므로, 진동 평가에 대해서도 강성을 고려하여 판단해야 할 것이라고 주장하였다. 이 규격은 이후 제정된 규격들의 기본이 되어 왔고, 설득력이 있는 것으로 오랜 기간동안 이용되어 왔다.
(2) Yates 규격(1949년) [베어링 진동규격]
H.G. Yates는 1949년에 사람의 감각을 기초로 작성한 Rathbone의 진동허용곡선을 진동속도가 일정한 방법으로 수정하여 평가기준을 발표하였다 (그림 12-19). 현재 ISO, JIS 등의 각종 규격 및 각 제작사의 권장치 등은 모두 이 Yates의 규격을 본보기로 한 수정판이다. 이는 진동 시베리티가 진동속도에 비례한다는 가정에 기초한 것으로, 오랫동안 현장에서 실용되어 왔으나 본질적인 면에서 몇 가지 문제점을 가지고 있다. 즉
① 운전속도 1,200 rpm 이하의 저속회전 기계에 대해서는 허용기준이 너무 커서 매우 느슨하다.
② 운전속도 7,000 rpm 이상의 고속회전 기계에 대해서는 허용기준이 너무 작고 매우 엄하다.
그림 12-19 Rathbone과 Yates 규격의 비교
(3) IRD Mechanalysis Chart [베어링 진동규격]
그림 12-20(일반 수평 회전기계에 대한 진동속도 및 가속도 시베리티 챠트)와 그림 12-21(일반 수평 회전기계에 대한 진동 변위 및 속도 시베리티 챠트)을 사용할 때 다음 사항을 고려해야 한다.
• 변위값을 사용할 때는 Filtering된 값만 사용해야 하지만, 시베리티 영역을 나누는 선은 일정한 속도선이므로 Filter되지 않은 즉, 총진동 속도값은 그대로 적용할 수 있다.
• 이 Chart는 기계의 구조물이나 베어링에서 취한 측정치에만 적용하며, 축진동 측정에는 적용하지 않는다.
• 이 Chart는 강성기초에 볼트로 견고하게 체결한 경우에 적용한다. Coil Spring이나 Rubber Pad와 같은 탄성 진동절연체에 얹힌 기계는 강성 기초 위에 설치된 기계보다 2배의 진동을 허용한다. 그러나 이 규칙은 기어와 결함이 있는 구름베어링과 같은 고주파진동에는 적용해서는 안된다.
그림 12-22는 기계별 진동 평가 기준을 나타낸 것으로 다음 사항을 고려해야 한다.
• Rigid Foundation(Vibration Isolator 설치시는 30~50% 추가 허용)
• 전동기의 Alarm치는 특별한 언급이 없는 한 해당 기계의 값에 준용
• External 기어 박스의 Alarm치는 해당 기계의 값에 25% 추가로 설정
• Alarm 1값 이상인 경우는 문제점이 확인되고 교정되지 않으면 조기 고장이 예상되는 경우
• Alarm 2값 이상인 경우 긴급조치를 하지 않으면 중대사고가 예상되는 경우
그림 12-20 일반 수평 회전기계에 대한 진동속도 및 가속도 시베리티 챠트
그림 12-21 일반 수평 회전기계에 대한 진동변위 및 속도 시베리티 챠트
그림 12-22 기계별 총진동의 평가 기준(Peak Overall Velocity, in/sec)
(4) VDI 2056(1964년) [베어링 진동규격]
독일기술자 협회(VDI)가 1955년에 조사를 시작하여 1964년 제 2편으로서 완성한 베어링 진동의 규격이다 (표 12-3). 이 협회에서는 Rathbone 이후의 각종 규격을 조사함과 동시에 독자적으로 계측 자료를 수집하여 넓은 분야의 기계에 적용 가능하도록 규격을 제정하였고, 이후 여러 나라에서 채용되어 왔다. 평가척도로서는 진동속도의 실효치(rms치, ㎜/s)를 이용한다. 이 규격의 특징은
① 진동 시베리티를 평가척도로서 채용하였다.
② 기계의 크기와 종류에 따라 6개의 그룹으로 나누고, 그중 4개 그룹(K, M, G, T)에 대한 한계치를 제공하고 있다 (표 12-3).
그룹 K : 약 15 ㎾까지의 전동기 및 이에 상당하는 소형기계
그룹 M : 15~75 ㎾의 전동기 및 특별한(견고한) 기초상의 약 300 ㎾까지의 중형 기계
그룹 G : 높은 고유진동수를 가지는 강성 기초상의 대형기계
그룹 T : 낮은 고유진동수를 가지는 경량구조 기초상의 대형기계(예로, 터보기계)
그룹 D : 발란싱이 이루어지지 않는 질량을 갖는 강성 기초상의 기계(예로, 왕복동 기계)
그룹 S : 그룹 D와 같은 종류의 기계로 탄성기초(예로, 방진지지)상의 기계
③ 그룹 G/T는 기계의 크기(출력)가 같아도 기초나 베어링 강성의 차이에 맞추어 그룹을 나누고 한계치를 달리하였다. 주의할 것은 같은 기계라도 측정방향에 따라 평가의 그룹이 달라질 수 있다는 것이다. 예로, 수직방향의 진동은 그룹 G의 기계로 평가하고, 수평방향의 진동은 그룹 T의 기계로 평가하는 일이 있을 수 있다.
④ 진동레벨은 진동속도(㎜/s)를 0.18에서 45 ㎜/s까지의 범위에 대해 양호(Good), 허용(Allowable), 견딤(Just Tolerable) 및 허용불가(Not Permissible)의 4종류로 규정하고 있다.
표 12-3 VDI 2056의 Vibration Criterion Chart
(5) ISO 2372(1974년)와 KS B 0142(1991년) [베어링 진동 규격]
독일 기술자협회(VDI)가 1964년 제정 완료한 VDI 2056규격을 기초로 측정방법, 평가척도, 기계의 그룹(Class)별 분할, 평가등급을 정하고 있다. 회전속도가 600~12,000 rpm 범위에서 회전되는 기계의 진동평가 기준이다. 10~1000 ㎐ 진동수 범위에서 진동속도의 RMS값이 같으면, 경험적으로 진동 시베리티는 같은 정도라 볼 수 있고, 그 시베리티의 레벨을 1 : 1.6의 비(4 dB)로 구획지어 0.28~71 ㎜/s 범위내의 단계를 정하고 있다. 지지조건에 따라 기계 전체의 1차 고유진동수가 회전속도보다 아래 있을 때를 탄성지지(Flexible Support) 또는 탄성기초(Flexible Foundation)라 하고, 위에 있을 때를 강성지지(Rigid Support) 또는 강성기초라고 한다. 평가는 단지 A, B, C, D의 4등급을 나타낼 뿐 구체적인 판정의 표현은 이후로 미루고 있다. 참고로 이를 국가 규격으로한 일본규격(JIS B 0906)에서는 A : 양호, B : 약간 나쁨, C : 나쁨, D : 아주 나쁨으로 표현하고 있다. 이 규격은 독일뿐만 아니라, 영국, 프랑스, 일본, 한국 등이 국내규격화 하였으며, 최근 ISO 10816에 흡수되었다. 표 12-4는 이 규격의 진동 기준표 이다.
표 12-4 ISO 2373의 기계 진동 시베리티
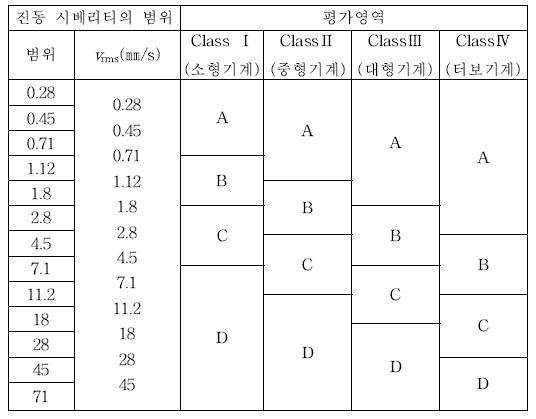
Class Ⅰ : (15 ㎾ 이하의 일반전동기)
Class Ⅱ : 15~75 ㎾의 전동기, 300 ㎾ 이하의 중형기계
Class Ⅲ : 강성기초 또는 진동측정 방향으로 높은 강성을 갖는 무거운 기초 위에
설치된 대형기계
Class Ⅳ : 비교적 탄성기초에 설치된 대형기계(터보발전기 세트)
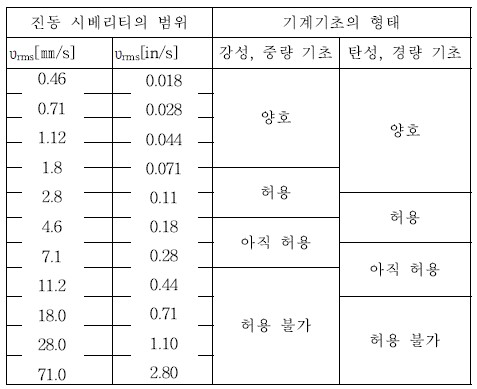
(6) ISO 3945(1977년) [베어링 진동규격]
베어링 진동의 규격으로 평가척도는 진동 시베리티를 이용하고 있고, 지지조건에 따라 기초의 고유진동수가 회전속도보다 높은 강하고 무거운 기초(Heavy Foundation)를 갖는 대형기계와, 기초의 고유진동수가 회전속도보다 낮은 탄성기초를 갖는 터보기계 등의 대형기계로 구분하고 있다. 그리고 양호(Good), 허용(Permissible), 아직 허용(Still Permissible) 및 허용 불가(Not Permissible)의 4등급으로 구분하고 있다. 이 규격은 VDI 2056의 그룹 G(높은 고유진동수를 갖는 견고한 기초상의 대형기계)와 그룹 T(낮은 고유진동수를 갖는 경량구조의 기초상의 대형기계)와 완전히 동일하다. 이 규격도 최근 ISO 10816에 흡수되었다. 표 12-5는 이 규격을 나타낸다.
표 12-5 대형 회전기계의 진동 기준(ISO 3945)
(7) ISO 10816-3(1996년) [베어링 진동규격]
ISO 10816 시리즈는 기존 베어링 진동의 평가규격으로 널리 사용되던 ISO 2372(1974년)와 ISO 3945(1985년)를 대체하여 제정되었다. 이 국제규격은 다음과 같이 6편(Part)으로 구성되어 있다.
제 1편 : 일반적인 지침
제 2편 : 50 ㎿를 초과하는 대형육상 증기터빈 발전기세트
제 3편 : 현장 측정시 15 ㎾이상의 정격출력과 120 rpm에서 15,000 rpm 사이의 정격
속도를 가지는 산업용 기계
제 4편 : 항공기 추진을 제외한 가스터빈 구동세트
제 5편 : 수력발전 및 양수플랜트의 기계세트
제 6편 : 100 ㎾ 이상의 정격출력을 가지는 왕복동기계
이 중에서 제 1편인 ISO10816-1은 베어링 하우징과 같은 비회전부에서 측정된 기계 진동의 측정과 평가를 위한 일반적인 지침을 제공하고, 제 2편부터 6편까지는 각종 기계들에 대한 평가기준과 평가방법을 규정하고 있다. 제 5편과 6편은 현재 위원회에서 규격안을 심의 중에 있고, 향후 제정, 공표될 예정이다.
이 규격(10816-3)은 출력 15 ㎾이상, 운전속도 120~15,000 rpm 사이의 산업용 기계장치의 진동평가에 적용된다. 구체적으로 이 규격에 적용되는 기계들은 다음과 같다.
∙ 50 ㎿까지의 출력을 가지는 증기 터빈
∙ 1500 rpm 이하나 또는 3600 rpm 이상의 속도와 50 ㎿ 이상의 출력을 가지는 고속 증기 터빈장치
∙ 원심식 압축기
∙ 3 ㎿까지의 출력을 가지는 산업용 가스터빈
∙ 원심식, 혼류식 또는 축류식 펌프
∙ 발전기
∙ 모든 형태의 전동기
∙ 경량 박판 구조가 아닌 송풍기(Blower)나 Fan
이 국제 규격에서 제외되는 기계들은 다음과 같다.
∙ 50 ㎿ 이상의 출력을 가지고 1500 rpm, 1800 rpm, 3000 rpm, 3600 rpm의 속도를 가지는 육상용 증기 터빈 발전기 장치 (ISO 10816-2를 참조)
∙ 3 ㎿ 이상의 출력을 가지는 가스 터빈 (ISO 10816-4를 참조)
∙ 수력 발전과 양수 플랜트에 쓰이는 기계장치 (ISO 10816-5를 참조)
∙ 왕복동 기계와 연결된 기계 (ISO 10816-6을 참조)
∙ 왕복동 펌프
∙ 왕복동 압축기
∙풍력 터빈
이 기준은 공칭 운전속도 범위 내에서 정상상태 운전조건하에 기계의 베어링, 베어링 지지부 또는 하우징에서 현장 광대역(Broad-Band) 진동 측정을 할 때 적용된다.
표 12-6 산업용 기계 진동 Severity (ISO 10816-3)
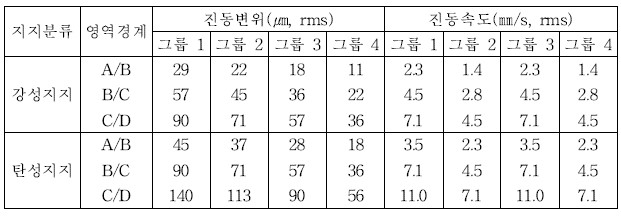
그룹 1 : 대형기계(300 ㎾~50 ㎿), 전기기계(축높이 H = 315 ㎜이상)
그룹 2 : 중형기계(15~300 ㎾), 전기기계(160≤H≤315 ㎜)
그룹 3 : 원심, 혼류 또는 축류펌프(15 ㎾이상, 다익 임펠라와 분리된 구동장치)
그룹 4 : 원심, 혼류 또는 축류펌프(15 ㎾이상, 다익 임펠라와 연결된 구동장치)
〈주의〉
① 이들 값은 정격속도 또는 특정속도 영역내의 정상상태 운전 조건하에서 모든 베어링, 베어링 지지대 또는 기계의 하우징 부에서의 반경방향 진동과, 스러스트 베어링 상에서 축방향 진동의 측정에 적용한다. 기계가 과도상태(즉, 속도 또는 하중이 변할 때)에 있을 때에는 이들 값을 적용할 수 없다.
② 다른 값 그리고 높은 값이 특수한 기계 또는 특별한 지지나 운전조건에 대해 허용할 수 있을지 모른다. 이런 모든 경우들은 제작자와 고객사이의 합의에 맡겨진다.
③ 현재 이들 기계의 가속도치를 감시하는 것은 일반적으로 실행되지 않고 있다. 가속도치에 대한 정보는 환영되고 있고, ISO/TC 108/SC2 사무국(Secretariat)으로의 전송을 위해 발원지의 국가표준기구에서 논의되어야 한다.
④ 막힘 방지(Clogless)를 위한 특수한 임펠러를 가지거나 또는 유사한 운전을 하는 펌프의 경우, 일반적으로 높은 진폭이 예상될 수 있다 (예를 들어 단일 깃 임펠러 경우는 3 ㎜/s까지).
(8) ISO 7919-3(1996년) [축진동 규격]
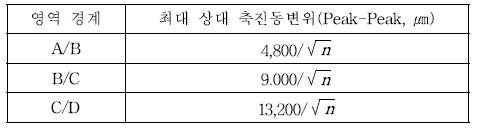
적용 대상은 유막베어링으로 지지되는 운전속도 1,000~30,000 rpm의 산업용 기계로서, 크기와 동력의 제한이 없이 증기터빈(50 ㎿ 이하), 터보압축기, 터보펌프, 터보발전기, 터보 Fan 및 기타 전기구동장치 및 부속기어에 사용될 수 있다. 이는 축의 최대 상대 변위가 축회전속도 n(rpm)의 제곱근에 반비례하는 형태로 영역경계의 값 S(p-p)이 추천된다.
표 12-7 산업용 기계와 가스터빈(ISO 7913-3/4)
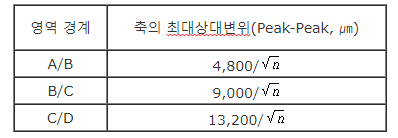
그림 12-23 표 12-7을 작도한 산업용기계에 대한 최대 상대 축진동 변위 (ISO 7919-3/4)
(9) API 611(1997년) [상대 축진동 규격] / API 612(1987년) [상대 축진동 규격]
API 611은 석유, 화학 및 가스 산업용 범용 증기터빈에 관한 규격이고, API 612는 석유 정제용 특수 증기 터빈에 관한 규격으로 진동 허용치는 모두 같으며, 베어링 부근의 상대 축진동을 비접촉 변위계로 계측하고, 이 값이 아래 식에 의한 값 또는 2.0 mil( = 50.8 ㎛, Peak-Peak) 중 어느 것을 초과해서는 안되도록 규정하고 있다.
변위진폭 = 25.4![]() (㎛, Peak-Peak, Unfiltered Value)
(㎛, Peak-Peak, Unfiltered Value)
여기서 n은 최대연속 회전속도(rpm) 이다. 상기 변위 진폭값은 편심량(Runout)을 포함한 값이다.
12.6.2 대형 육상 증기터빈 발전기 세트 (Large Land-Based Steam Turbine Generator Sets)
(1) ISO 10816-2(1996년) [베어링 진동규격]
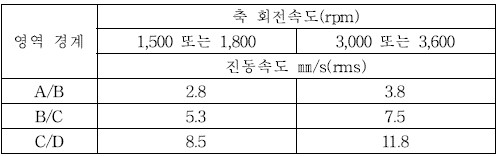
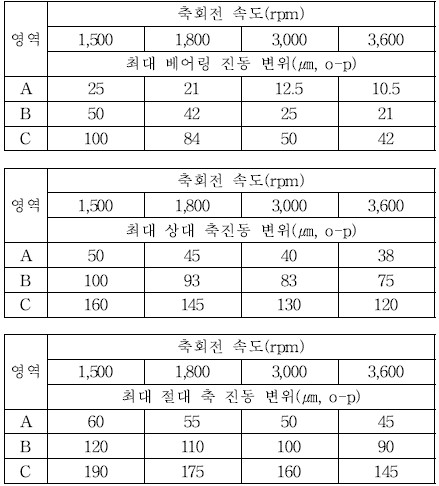
이 규격에서 제공되는 기준은 1500, 1800, 3000 또는 3600 rpm의 정격운전 속도를 가지는 50 ㎿ 이상의 증기터빈 발전기에 적용된다. 이 기준은 정격운전 속도에서 정상상태 운전조건과 베어링 하우징 또는 베어링지지대의 반경방향에서 얻어진 현장의 광대역 진동측정에 적용한다. 50 ㎿ 이하는 산업용 기계에 대한 규격(ISO 10816-3)의 적용을 받는다.
표 12-8 베어링 진동속도로 나타낸 평가 영역 경계(ISO 10816-2)
(2) ISO 7919-2(1996년) [축진동 규격]
기계의 베어링 진동을 측정, 평가하는 ISO 10816에 대해, ISO 7919 시리즈 규격은 축 위에서 진동변위를 직접 측정하는 축진동에 대한 규격으로, 축의 휘돌림 궤적, 최대진폭을 측정하는 조건과 방법, 측정치의 표시방법 그리고 평가방법과 기준을 정하고 있다. 이 규격은 다음과 같이 5편(Part)으로 구성되어 있다.
제 1편 : 일반적인 지침
제 2편 : 대형 육상 증기터빈 발전기세트
제 3편 : 산업용기계
제 4편 : 가스터빈 세트
제 5편 : 수력발전과 양수플랜트의 기계세트
ISO 7919 규격은 정상적인 운전조건하에서 각종 회전기계의 베어링이나 또는 이에 가까운 부분에서 측정한 축진동의 평가기준을 적용하기 위한 지침으로, 기동 및 정지 또는 공진영역의 통과 등과 같은 과도상태 조건에는 적용할 수 없다. 축진동 측정장비인 변환기는 축에 직접 접촉시키는 축접촉 변환기와 비접촉 변환기가 있는데 어느 것이든 이용될 수 있다. 축진동 평가의 척도로는 진동변위를 채용하고 있고, ISO 7919-1에서 축궤적의 최대치 S(p-p)max를 평가의 기본으로 하고 있으나, 이를 쉽게 측정하는 측정 계기가 없으므로 앞에서 설명한 3가지 근사방법중 하나를 대신 사용한다.
평가 기준은 ISO 10816과 같이 진동크기, 진동크기의 변화 그리고 운전한계가 있으며, 진동크기를 영역 A~D로 구분하는 것과 운전 한계치 설정 등은 ISO 10816과 동일하다.
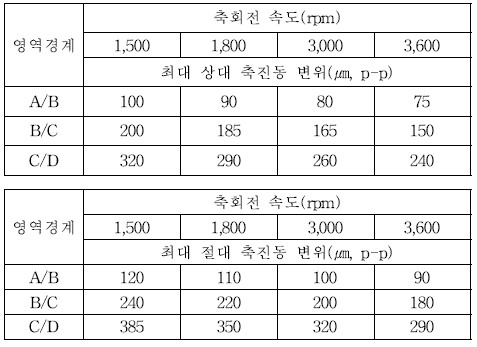
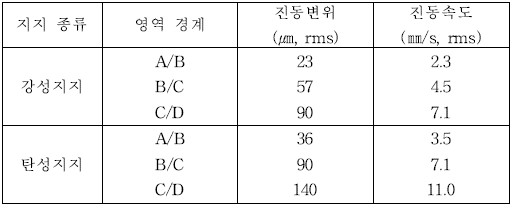
이 규격은 1500~3600 rpm의 운전범위내에서 정격운전 속도를 가지며, 50 ㎿이상의 발전출력을 가지는 발전소용 증기터빈 발전기 세트에 적용된다. 규격에서 주어지는 최대 변위값은 두 개의 직교하는 선택된 측정방향에서 측정된 양진폭 변위중 큰 값을 의미한다. 이는 상대 축진동과 절대 축진동에 대해 다른 추천값을 제공하고 있고, 틸팅패드 베어링이나 타원베어링으로 지지된 경우는 대체 진동값을 지정할 필요가 있다.
표 12-9 영역 경계에서 대형 증기 터빈 발전기 세트에 대한최대 상대 및 절대 축진동 변위(ISO 7919-2)
(3) 축진동 규격의 비교
규격화의 역사가 짧기 때문에 규격의 종류는 많지 않으나 내용은 충실하다. 대표적인 것으로 ISO 7919, API 612와 617, VDI 2059 일본 전기협회 기술기준 JEAC 3717 및 미국전기 제작자 협회규격 NEMA SM21등이 있다. 이들 규격의 공통된 특징은 평가척도로서 진동변위(㎛)를 이용하고 있고, 허용치가 기계 회전속도 n(rpm)의 제곱근에 반비례(1/![]() )하는 것이다. 베어링 진동의 허용치에서는 진동속도가 일정, 즉 변위진폭으로 환산하면 회전속도에 반비례(1/n)하는 것이 일반적인 것과 대조적이다. 표 12-10은 축진동 규격을 비교한 것이다.
)하는 것이다. 베어링 진동의 허용치에서는 진동속도가 일정, 즉 변위진폭으로 환산하면 회전속도에 반비례(1/n)하는 것이 일반적인 것과 대조적이다. 표 12-10은 축진동 규격을 비교한 것이다.
표 12-10 축진동 평가에 관한 규격비교 (단위 : ㎛)
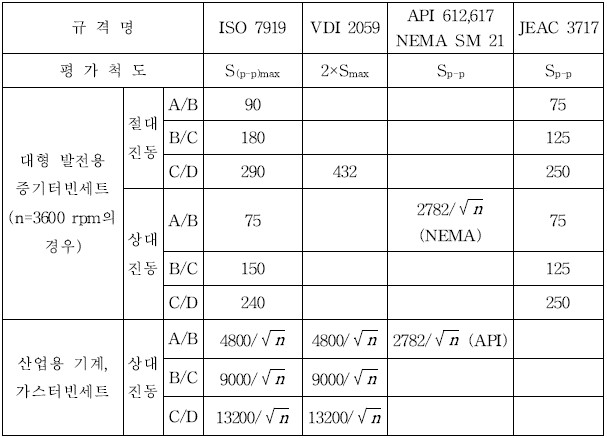
단, 표중의 수치는 n=3600 rpm의 경우의 허용치이다.
A : 시운전시
B : 통상 운전시
C : 경보치
D : 정지치
(4) ABB사 규격 [베어링 및 축진동 규격]
표 12-11 증기터빈의 베어링진동, 상대 축진동 및 절대 축진동에 관한 ABB사의 규격
(5) GEC사 규격 [베어링 및 축진동 규격]
표 12-12 GEC사의 증기터빈 진동허용 진동치 (㎛ p-p)
12.6.3 가스터빈 세트 (Gas Turbine Sets)
(1) ISO 10816-4(1996년) [베어링 진동규격]
이 규격은 출력 3 ㎿이상이고, 부하상태에서 속도범위가 3,000~20,000 rpm 사이에서 구동되는 대용량 가스터빈과 피동장치에 모두 적용된다. 항공기용 가스터빈은 이 규격에서 제외되고, 3 ㎿이하의 가스터빈은 ISO 10816-3의 적용을 받는다.
이들 값은 정격운전속도에서 정상 운전조건하에서 모든 베어링 하우징 또는 지지대의 반경방향의 진동측정에 사용해야 한다. 또한 스러스트 베어링이 설치된 하우징의 축중심선에서 축방향 진동에 적용한다. 측정값은 현장에서 정상상태 운전하에서 수집된 광대역 값을 가정한다.
표 12-13 가스터빈(ISO 10816-4)

표 12-14 가스터빈 구동의 50 ㎿이상의 발전기(ISO 10816-2)
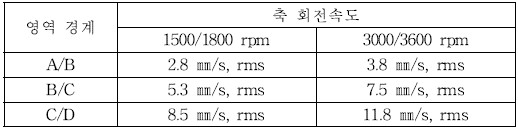
표 12-15 가스터빈 구동의 50 ㎿이하의 압축기와 발전기(ISO 10816-3)
(2) ISO 7919-4(1996년) [축진동 규격]
이 규격은 유막베어링으로 지지된 3 ㎿이상의 출력과 3,000~30,000 rpm의 회전속도를 가지는 모든 가스터빈세트(기어 포함)에 적용된다. 단 구름요소 베어링으로 지지되는 항공기용 가스터빈은 제외한다. 평가영역의 경계값은 축회전속도 n(rpm)의 제곱근에 반비례하는 형태이며 산업용 기계(ISO 7919-3)와 동일하다.
표 12-16 영역경계의 최대 상대 축진동 변위(ISO 7919-4)
12.6.4 수력 및 양수발전소의 기계 (Machine Sets in Hydraulic Power Generating and Pumping Plants)
(1) ISO 7919-5(1997년) [축진동 규격]
이 규격은 60~1,800 rpm의 운전속도와 Shell 또는 Shoe 형태의 슬리브 베어링으로 지지되는 출력 1 ㎿이상의 수력기계에 적용된다. 구체적인 적용 대상 기계로는 수차, 발전기, 펌프-수차, 전동기-발전기, 구동용 터빈, 여자기 등의 수력 및 양수발전 플랜트에 사용되는 기계이다. 그림 12-24, 25는 각각 상대 축진동 변위를 축궤적의 최대치 Smax와 양진폭(Peak-Peak) Sp-p를 축 회전속도의 함수로 나타낸 것이다. 이들 값은 정상운전 조건하에 정격속도에서 저널베어링이 지지하는 주부하(Main Load) 또는 이에 가까운 곳에서 반경방향으로 측정한 것이다.
그림 12-24 최대 축 상대진동 변위(Sp-p)의 권장 평가영역 (Smax)
그림 12-25 최대 축 상대진동 변위의 권장 평가영역
12.6.5 원심, 사류 및 축류 펌프 (Centrifugal, Mixed Flow and Axial Flow Pumps)
(1) KS B 6301(1991년) [베어링 진동규격]
이 규격은 원심펌프, 사류펌프 및 축류펌프에 대한 진동평가를 위한 허용치를 규정한 것이다. 보일러 급수용 원심펌프(KS B 6304)에 대한 기준치도 이 규격을 따르도록 하고 있으며, 복수펌프, 자흡 원심펌프, 기름용 원심펌프(KS B 6305~6306)에 대해서는 진동 허용치에 대한 언급이 없다.
계측은 횡축 펌프는 베어링 중심에서, 그리고 수직펌프는 전동기의 상부 베어링중심에서의 진동을 계측하며, 가능한 실제 부착상태에서 계측할 것을 권장하고 있다. 이 규격은 일본표준협회(JIS)의 규격(JIS B 8301)을 번안한 것으로 베어링진동의 변위진폭(양진폭, Peak-Peak치)을 회전수의 함수로 나타내고 있다 (그림 12-26).
그림 12-26 원심, 사류 및 축류펌프의 진동허용치 (KS B 6301)
(2) Hydraulic Institute사 규격(1969년) [베어링 진동규격]
미국 Hydraulic Institute가 원심펌프의 진동허용치로 규정한 규격으로 현재의 거의 모든 규격이 HI규격을 인용하고 있을 정도로 널리 이용되고 있다. 이 규격은 현저하게 높은 진동치를 허용하고 있고, 또 단지 축 회전수의 동기성분 주파수와 펌프 설계유량(Best Efficiency Point)에서 진동진폭을 규정하고 있는 것이 특징이다. 그러나, 부분유량 상태나 비동기 성분의 진동이 문제로 될 때는 이용할 수 없다. 이 규격에서는 펌프 지지물을 강체 구조물과 비강체(탄성)구조물인 경우로 구분하여 허용진동 제한치를 규정하고 있다. 특히 탄성 구조물인 경우 운전속도는 구조물의 고유 진동수의 상하 25% 범위 내에 있어서는 안된다. 또한 진동변위(D), 진동속도(V) 및 진동가속도(A) 사이에 아래의 변환공식을 제공하고 있다.
D = 1.910×104 V/cpm(mils, Peak-Peak)
V = 3.696×103 A/cpm(in/sec, Peak)
A = 2.704×10-4 V․cpm(G, Peak)
여기서 cpm은 진동수(Cycle Per Minute)이다.
그림 12-27은 작동유체가 청정유체이고, 강체 구조물로 지지된 수평형 펌프의 경우의 현장 허용진동 한계치를 나타낸다. 베어링 하우징에서 측정된 변위진폭(mils, Peak- Peak)을 진동주파수(cpm)에 대해 주어지고, 참고로 진동속도와 가속도가 주어져 있다. 그림에서 굵은 실선이 허용 진동 한계치 이다. 그림 12-28은 강체구조물로 지지된 수평형 Non-Clog 펌프에 대한 현장 허용 진동 한계치를 나타낸다. 그림 12-29는 Piggyback 형식으로 설치된 전동기를 갖는 수평형 및 수직형 펌프에 대한 것으로, 수직형은 최상부 전동기 베어링에서 측정한다. 그림 12-30은 비강체 구조물로 지지된 수직형 Non-Clog 펌프의 현장 허용 진동 한계치를 나타낸다. 측정은 최상부 전동기 베어링 또는 전동기가 펌프와 완전하게 설치되지 않았으면 최상부 펌프 베어링에서 측정한다. 그림 12-29, 30의 규격은 펌프 Base로부터 측정점까지의 거리에 따라 허용진동 한계치를 따로 정하고 있는 것이 특징이다.
그림 12-27 수평형 펌프의 허용 현장 진동 한계치 (청정유체, 강성구조물)
그림 12-28 수평형 Non-Clog 펌프의 허용 현장 진동 한계치 (강체 구조물)
그림 12-29 Piggyback 형식으로 설치된 전동기를 갖는 수직형 및 수평형펌프의 허용 현장 진동 한계치 (비강체 구조물)
그림 12-30 수직형 Non-Clog 펌프의 허용 현장 진동 한계치 (비강체 구조물)
(3) API 610(1989년) [베어링 및 축진동 규격]
API 610(일반 석유정제용 원심펌프)은 공장 및 현지에서의 승인 시험에 적용되도록 제정된 것이다. 따라서 운전시의 감시용으로 이들 규격의 허용치를 사용하는 경우에는 충분한 배려가 필요하다.
모든 구름베어링을 가지는 펌프와 증속 기어를 가지는 펌프에 대해 정격속도와 용량의 ±10%에서 성능 시험중에 축에 직각 방향으로 베어링 하우징에서 측정한 Unfiltered 및 Filtered Vibration은 그림 12-31A에서 보여준 속도나 변위값중 보다 엄격한 값을 초과해서는 안된다. Filtered Vibration은 운전속도 주파수, 베인 통과 주파수 및 구매자가 선정한 주파수에서 측정된 것이다.
모든 슬리브 베어링을 가지는 펌프에 대해 정격 속도와 용량의 ±10%에서 성능 시험중에 축상에서 측정한 Unfiltered 및 Filtered Vibration은 그림 12-31B에서 보여준 속도나 변위값중 보다 엄격한 값을 초과해서는 안된다. Filtered Vibration은 운전속도 주파수, 베인 통과 주파수 및 구매자가 선정한 주파수에서 측정된 것이다.
진동값은 강체 커플링을 가지는 수직형 펌프에서는 전동기의 상부 베어링 하우징에서 취하고, 탄성 커플링을 가지는 수직형 펌프에서는 상부 펌프 베어링 하우징에서 취한다.
그림 12-31A 베어링 하우징 진동 허용치(구름베어링) [API 610]
그림 12-31B 축진동 허용치(슬리브 베어링) [API 610]
12.6.6 왕복동 펌프 (Reciprocating Pumps)
(1) KS B 6308(1985년) [베어링 진동규격]
이 규격은 유압펌프를 제외한 크랭크식과 증기직동식 왕복동펌프에 대한 규정운전 상태에서의 진동 허용치를 규정한 것으로, 펌프 크랭크 베어링에서의 진동변위(양진폭, Peak-Peak치)를 크랭크축 회전수에 대해 나타내고 있다 (그림 12-32). 진동평가는 우수, 양호, 허용, 허용불가의 4종류의 레벨로 나누어 나타낸다.
그림 12-32 크랭크식 왕복동 펌프의 진동 허용치(KS B 6308)
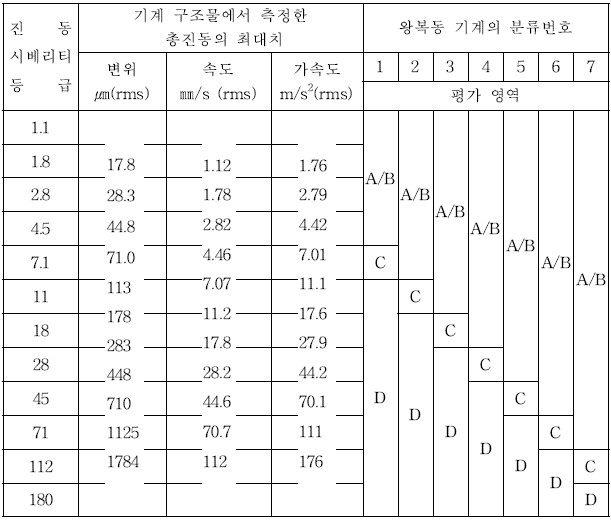
(2) ISO 10816-6(1995년) [베어링 진동규격]
이 규격은 출력 100 ㎾ 이상의 왕복동기계에 대한 진동 평가를 위한 허용치를 규정한 것이다. 전형적인 대상 기계로는 선박 추진 엔진, 선박 보조 엔진, 디젤 발전기용 엔진, 가스 압축기 및 디젤 기관차 엔진 등이 있고, 차량용 기계에는 이 규격을 적용하지 않는다.
왕복동 기계는 형식, 적용대상, 크기, 형상, 탄성 또는 강성 지반 및 속도에 따라 분류되며, 예를 들면 많은 산업용 및 선박용 디젤엔진은 분류번호 5, 6 또는 7정도로 분류된다.
표 12-17 왕복동 기계의 분류번호와 진동치
12.6.7 송풍기 (Turbo-Fans and Blowers)
(1) KS B 6311(1992년) [베어링 진동규격]
이 규격은 압력비 약 1.1 미만의 원심, 축류 및 사류 송풍기(Fan, Blower)에 대한 진동허용치를 규정한 것이다. 압축비가 1.1이상을 초과하는 것은 KS B 6350(터보형 블로워/압축기시험 및 검사방법)에 따른다. 계측은 규정회전수에 대해 베어링 상자 위에서 실시하고, 진동변위(양진폭, Peak-Peak치)를 축회전수에 대해 나타내고 있다 (그림 12-33). 참고로 변위진폭 s(㎛)와 진동속도 υ(㎜/s)의 관계식은
으로 주어지고 있고, 여기서 ω는 회전각속도(rad/s), n은 회전속도(rpm) 이다.
그림 12-33 송풍기의 진동 허용치(KS B 6311)
12.6.8 압축기 (Compressors)
(1) KS B 6350(1991년) [베어링 진동규격]
이 규격은 압력비 약 1.1 이상의 터보형 송풍기(Blower)와 압축기(Compressor)를 상온, 상압의 공기를 이용하여 공장에서 시험할 때의 진동허용치를 규정하고 있다. 터보형의 경우 원심, 사류 및 축류 송풍기를 포함한다. 진동은 규정회전수에서 베어링 또는 그 부근에서 측정하고 진동허용치는 KS B 6311과 동일하다.
(2) KS B 6351(1991년) [베어링 진동규격]
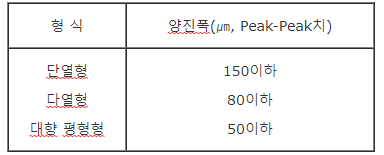
이 규격은 총 압력비가 약 2이상의 용적형인 왕복 및 회전압축기를 상온, 상압의 공기를 사용하여 공장에서 시험할 때의 진동허용치를 규정하고 있다. 회전 압축기의 진동허용치는 터보형 압축기(KS B 6350)와 동일하고, 왕복압축기에 대해서만 별도의 허용치를 규정하고 있다 (표 12-18). 진동측정은 베어링 또는 그 부근의 3방향(수평, 수직 및 축방향)에서 측정하는 것을 원칙으로 한다.
표 12-18에서 단열형은 연결봉이 하나인 것으로 텐덤형을 포함하고, 다열형은 연결봉이 복수로 별(星)형을 포함한다. 단, 내연기관 구동 또는 공기탱크위에 설치된 소형 압축기는 제외한다.
표 12-18 왕복 압축기의 진동 허용치(KS B 6351)
(3) API 617(1988) [상대 축진동]
API 617은 일반 석유 정제용 원심 압축기에 관한 규격으로 베어링 부근의 상대 축진동을 비접촉 변위계로 계측하고, 이 값이 아래 식에 의한 값 또는 2.0 mil(50 ㎛, P-P)중 어느 것을 초과해서는 안되도록 규정하고 있다.
변위진폭 = ![]() (㎛, P-P, Unfiltered Value)
(㎛, P-P, Unfiltered Value)
여기서 n은 최대연속 회전속도(rpm)이다. 상기 변위 진폭값은 편심량(Runout)을 포함한 값이다.
12.6.9 전동기 (Motors)
(1) IEC 34-14(1996년) [베어링 및 축진동 규격]
① 베어링 하우징 진동 허용치
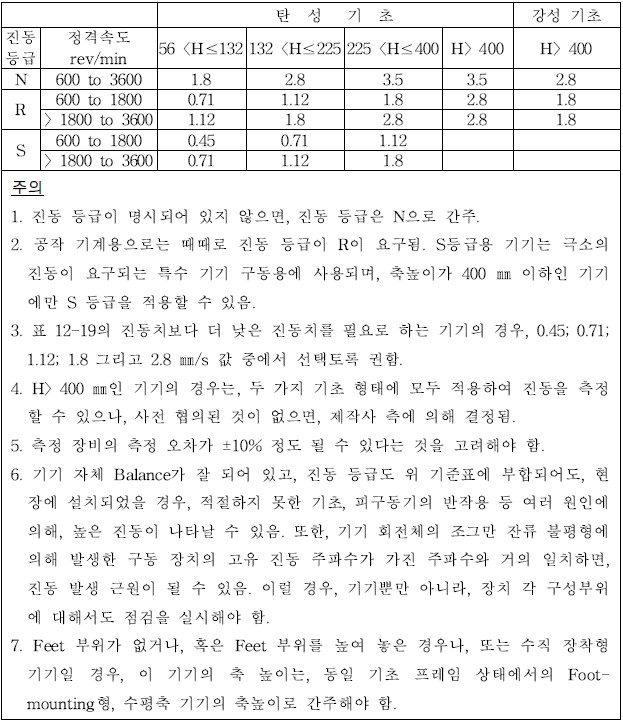
축 직경이 56 ㎜ 이상되는 직류 및 3상 교류기에서, 두 가지 기초 형태(전동기를 스프링이나 고무 같은 탄성 기초 위에 설치 혹은 육중한 기초 위에 단단히 고정 설치)에 대한, 3가지 진동 등급에서의 진동 허용치는 표 12-19와 같다. 여기서 N은 Normal, R은 Reduced 그리고 S는 Special을 뜻한다.
2극 교류기의 경우, 전력 계통 2배 주파수에서 상당한 진동이 발생할 수 있으며, 이 진동 성분을 정확하게 측정하기 위해서는, 기기 Foot 부위에서 측정한, 수평 및 수직방향 최대 진동 속도값이, 인접 베어링에서 측정한, 각 수평 혹은 수직 방향 최대 진동 속도값의 25%를 초과하지 않을 만큼, 기기를 기초에 견고히 고정시킨 다음 측정해야 한다. 축높이가 H〉225 ㎜이고, 2배 전력계통 주파수 진동이 있는 기기의 경우, 견고한 기초에 고정시켜 시험을 실시하되, 진동치가 표 12-19의 H〉400 ㎜인 기기의 강성 기초에서의 진동치를 초과해서는 안된다.
축방향 베어링 진동 평가는 베어링의 기능과 구조에 따라 다르다. 추력 베어링의 경우, 축방향 진동값은, 슬리브 베어링의 Metal Liner나, 혹은 구름베어링의 부위에 손상을 줄 수 있는 Thrust Pulsation과 관련이 있다. 이 베어링의 축방향 진동 평가는 횡진동 측정시와 같으며, 표 12-19의 허용치가 적용된다.
표 12-19 축높이 H(㎜)에 따른 진동 허용치(㎜/s rms)
② 상대 축진동 허용치
상대 축진동 측정은 슬리브 베어링이 설치된, 정격 1000 ㎾ 이상인 2극 및 4극기에 대해서만 실시토록 권장함.
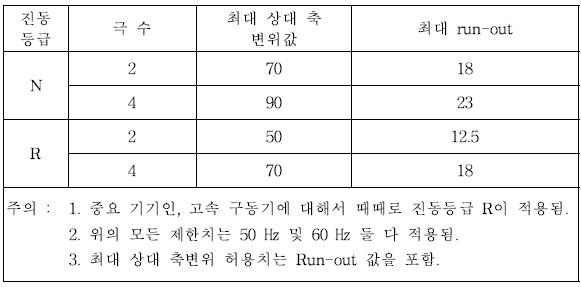
축진동 측정용 변환기 설치가 가능토록 특별한 장치가 되어 있는, 슬리브 베어링을 가지는 기기의 상대 축진동 변위 허용치는 표 12-20과 같다. 이 허용치는 앞 ①항의 요구 조건 이외 추가로 요구되는 사항이 있다
표 12-20 최대 축진동(Sp-p)과 최대 Runout의 허용치 (㎛)
(2) NEMA MG1(1993년) [베어링 및 축진동 규격]
① 베어링 하우징 진동 허용치
그림 12-34는 진동기의 진동 허용치를 나타낸 것으로 무부하, 커플링이 연결 안된, 스프링이나 고무 같은 탄성 기초 위에 설치된 기기에 대한 것이며, 강성 기초 위에 설치된 경우의 진동 허용치는 이 값에 0.8배를 곱한 것으로 한다.
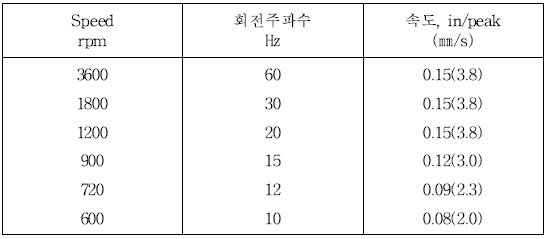
탄성 기초에 장착된 표준 기기의 경우, 그림 12-34 최상부 곡선의 속도치를 초과해서는 안된다. 예를 들어, 회전주파수에서의 허용치는 표 12-21과 같다.
그림 12-34에 있는 제한값 0.15(표준 기기)보다 더 낮은 진동값이 요구되는 특수 기기의 경우, 진동값은 그림 12-34의 여러 곡선에 나타난 허용치를 초과하지 않아야 한다. 이 낮은 진동값(즉 0.08, 0.04, 0.02 혹은 0.01)이 적용되는 기기는 제작자와 구매자간의 동의에 따른다.
[주] 일정한 변위선과 일정한 속도선의 교차점은 약 20 ㎐이며, 일정한 속도선과 일정한 가속도선의 교차점은 진동허용치 0.15, 0.08 및 기타에 대하여 각기 400, 700 및 1500 ㎐이다.
그림 12-34 탄성 기초 위에 설치된 전동기의 진동 허용치
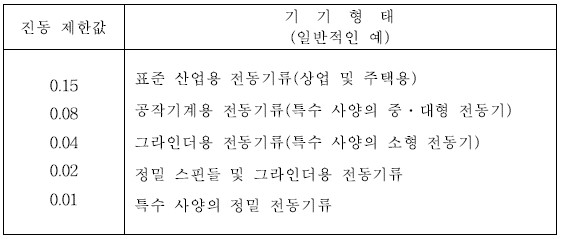
표 12-21 필터링하지 않은 진동 허용치
② 상대 축진동의 허용치
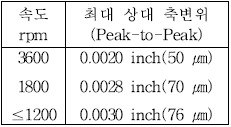
견고한 기초에 고정한 상태에서의 슬리브 베어링이 장착된 표준 기기의 상대 축진동 허용치는 전기적 및 기계적인 Runout값을 포함하여, 표 12-22의 값을 초과하지 말아야 한다. 또한 표 12-22에 있는 상대 축진동 값보다 더 낮은 값이 요구되는 특수 기기의 진동값은, 전기적 및 기계적 Runout값을 포함하여 표 12-23의 값을 초과하지 말아야 한다.
표 12-22 표준 기기의 필터링 되지 않은 최대 상태 축변위(Sp-p) 제한치
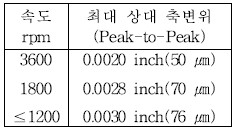
표 12-23 특수 기기의 필터링 되지 않은 최대 상대 축변위(Sp-p) 제한치
(3) API 541(1987년) [베어링 및 축진동 규격]
API 541은 250마력 이상의 농형 유도전동기에 관한 규격으로 기기가 강성 기초 위에 견고하게 설치된 경우의 진동 허용치이다.
그림 12-35는 슬리브 베어링을 가지는 전동기의 베어링 하우징에서 측정한 진동허용치이고, 그림 12-36은 슬리브 베어링을 가지는 전동기의 축에서 측정한 진동허용치 이며, 그림 12-37은 구름베어링을 가지는 전동기의 베어링 하우징에서 측정한 진동 허용치이다.
그림 12-35 슬리브 베어링을 가지는 전동기의 베어링 하우징에서의 진동 허용치
[축방향 진동허용치는 그림에 있는 값인 반경 방향의 값의 0.8배로 한다].
그림 12-36 슬리브 베어링을 가지는 전동기의 축진동 허용치[Runout 값이 포함된 것임]
그림 12-37 구름베어링을 가지는 전동기의 베어링 하우징에서의 진동허용치
[축방향 진동 허용치는 그림에 있는 값인 반경방향의 값의 0.8배로 한다].
12.6.10 공작기계 (Machine Tools)
그림 12-38은 완성 제품의 질에 영향을 미칠 수 있는 그라인더와 공작기계의 진동 허용치를 구하는 지침으로, 이것은 경험에 의한 값이며 제품의 크기와 요구되는 허용공차에 따라 다를 수 있다. 이 허용치는 기계 구조물이나 베어링에서 취한 Filtered Vibration 이다.
그림 12-38 공구/공작기계의 진동 허용치